
蜂鸣器驱动电路的工作原理
如果问你蜂鸣器工作原理是什么,我想你肯定会首先问什么是蜂鸣器呢?所谓的蜂鸣器是一种一体化结构的电子讯响器,在电路中用字母“H”或“HA”(旧标准用“FM”、“LB”、“JD”等)表示。蜂鸣器采用直流电压供电,其能发出单调的或者某个固定频率的声音,如嘀嘀嘀,嘟嘟嘟等。蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型,通常在计算机、打印机、复印机、报警器、电子玩具、汽车电子设备、电话机、定时器等电子产品中作发声器件使用。下面为大家介绍的是蜂鸣器的工作原理。
蜂鸣器的工作原理
电路原理图使用SH69P43 为控制芯片,使用4MHz 晶振作为主振荡器。
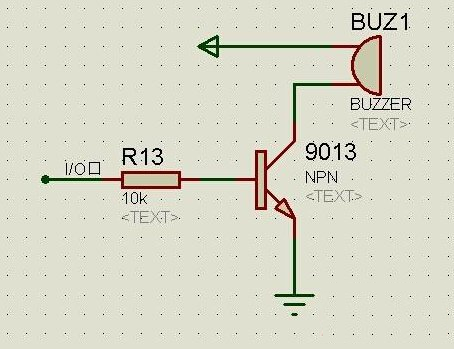
PORTC.3/T0 作为I/O 口通过三极管Q2 来驱动蜂鸣器LS1,而PORTC.2/PWM0 则作为PWM 输出口通过三极管Q1 来驱动蜂鸣器LS2。另外在PORTA.3 和PORTA.2 分别接了两个按键,一个是PWM 按键,是用来控制PWM 输出口驱动蜂鸣器使用的;另一个是PORT 按键,是用来控制I/O 口驱动蜂鸣器使用的。连接按键的I/O 口开内部上拉电阻。
先分析一下蜂鸣器。所使用的蜂鸣器的工作频率是2000Hz,也就是说蜂鸣器的驱动信号波形周期是500μs,由于是1/2duty 的信号,所以一个周期内的高电平和低电平的时间宽度都为250μs。软件设计上,将根据两种驱动方式来进行说明。
a) 蜂鸣器工作原理:PWM 输出口直接驱动蜂鸣器方式
由于PWM 只控制固定频率的蜂鸣器,所以可以在程序的系统初始化时就对PWM 的输出波形进行设置。
首先根据SH69P43 的PWM 输出的周期宽度是10 位数据来选择PWM 时钟。系统使用4MHz 的晶振作为主振荡器,一个tosc 的时间就是0.25μs,若是将PWM 的时钟设置为tosc 的话, 则蜂鸣器要求的波形周期500μs 的计数值为500μs/0.25μs=(2000)10=(7D0)16,7D0H 为11 位的数据,而SH69P43 的PWM
输出周期宽度只是10 位数据,所以选择PWM 的时钟为tosc 是不能实现蜂鸣器所要的驱动波形的。
这里将PWM 的时钟设置为4tosc,这样一个PWM 的时钟周期就是1μs 了,由此可以算出500μs 对应的计数值为500μs/1μs=(500)10=(1F4)16,即分别在周期寄存器的高2 位、中4 位和低4 位三个寄存器中填入1、F 和4,就完成了对输出周期的设置。再来设置占空比寄存器,在PWM 输出中占空比的实现是
通过设定一个周期内电平的宽度来实现的。当输出模式选择为普通模式时,占空比寄存器是用来设置高电平的宽度。250μs 的宽度计数值为250μs/1μs=(250)10=(0FA)16。只需要在占空比寄存器的高2 位、中4 位和低4 位中分别填入0、F 和A 就可以完成对占空比的设置了,设置占空比为1/2duty。
以后只需要打开PWM 输出,PWM 输出口自然就能输出频率为2000Hz、占空比为1/2duty 的方波。
b) 蜂鸣器工作原理:I/O 口定时翻转电平驱动蜂鸣器方式
使用I/O 口定时翻转电平驱动蜂鸣器方式的设置比较简单,只需要对波形分析一下。由于驱动的信号刚好为周期500μs,占空比为1/2duty 的方波,只需要每250μs 进行一次电平翻转,就可以得到驱动蜂鸣器的方波信号。在程序上,可以使用TIMER0 来定时,将TIMER0 的预分频设置为/1,选择TIMER0 的始终为系统时钟(主振荡器时钟/4),在TIMER0 的载入/计数寄存器的高4 位和低4 位分别写入00H 和06H,就能将TIMER0 的中断设置为250μs。当需要I/O 口驱动的蜂鸣器鸣叫时,只需要在进入TIMER0 中断的时候对该I/O 口的电平进行翻转一次,直到蜂鸣器不需要鸣叫的时候,将I/O 口的电平设置为低电平即可。不鸣叫时将I/O 口的输出电平设置为低电平是为了防止漏电。
上面主要通过介绍蜂鸣器工作电路原理,为大家展示了蜂鸣器的技术工作原理的详情,通过上面的介绍,希望大家能够对蜂鸣器有一个大概的了解。
- 上一篇:蜂鸣器的分类以及异音解析 2016/12/17
- 下一篇:电磁式有源蜂鸣器常见问题 2016/12/17